solution-finder is a command-line tool for searching piece operations and calculating probabilities under specified conditions in Tetris. It can perform calculations under complex conditions by combining commands.
Features (List of Commands)
percent : Calculate the probability of getting a perfect clear from a specified field.
path : Output all the operations for a perfect clear from a specified field.
setup : Outputs all the operations to fill according to a specified form.
ren : Output all the operations to continue REN(COMBO) from a specified field.
spin : Output all the operations that can be T-spin from a specified field.
cover : Calculate the coverage of piece sequences for specified operations.
util fig : Generate images based on the fumen.
util fumen : Convert the input fumens and output new fumens.
util seq : Expand to piece sequences from solution-finder patterns.
verify kicks : Check confirmation of the kick property file.
Documentation
Please see the documents for setup and usage instructions.
Licenses
This software includes the work that is distributed in the Apache License 2.0.
Apache Commons CLI
Copyright 2001-2017 The Apache Software Foundation
This product includes software developed at
The Apache Software Foundation (http://www.apache.org/).
Unlock a curated list of powerful websites that will transform your online experience. From productivity tools to hidden gems, explore the must-know resources of the internet.
PowerfullWeb is a project designed to share a curated list of powerful and transformative websites. Whether you’re looking for productivity tools or hidden gems, PowerfullWeb has something for everyone.
Features
Curated List: Handpicked websites that offer unique and powerful features.
Detailed Descriptions: Each entry includes a detailed description to help users understand the value of the website.
Easy Navigation: Simple and intuitive UI to navigate through the list of websites.
Usage
To explore the curated list of websites, simply open the index.html file in your web browser. The homepage will provide you with a variety of powerful websites, each with a description and a link to visit.
Example
Here is an example of a featured tool:
Sapiens Character Builder
Sapiens is a beautiful library of modular, component-based character illustrations for Sketch and Figma.
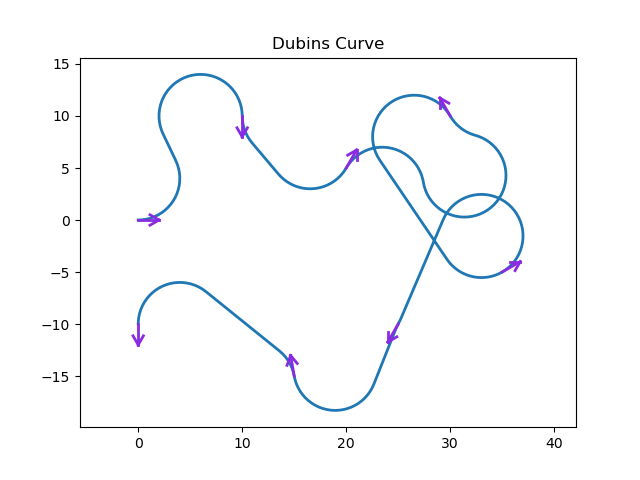
Robot Motion planning is a computational problem that involves finding a sequence of valid configurations to move the robot from the source to the destination. Generally, it includes Path Searching and Trajectory Optimization.
Path Searching: Based on path constraints (e.g., avoiding obstacles), to find the optimal sequence for the robot to travel from the source to the destination without collision.
Trajectory Optimization: Based on kinematics, dynamics and obstacles, to optimize the trajectory of the motion state from the source to the destination according to the path.
This repository provides the implementation of common Motion Planning algorithms. The theory analysis can be found at motion-planning. Furthermore, we provide Python and MATLAB version.
NOTE: Please refer to #48 if you meet libignition dependency error.
cd scripts/
./build.sh # you may need to install catkin-tools using: sudo apt install python-catkin-tools
Execute the code.
cd scripts/
./main.sh
NOTE: Modifying launch files may not have any effect, because they are regenerated by a Python script based on src/user_config/user_config.yaml when you run main.sh. Therefore, you should modify configurations in user_config.yaml instead of launch files.
Use 2D Nav Goal in RViz to select the goal.
Moving!
You can use the other script to shutdown them rapidly.
cd scripts/
./killpro.sh
Multi agents
# 1. Replace with user_config_multi.yaml in main.sh# 2. Wait for initialization# 3. Publish goals
rosrun sim_env goal_publisher.py
To better understand the project code, detailed interface documentation can be generated using the doxygen tool. First install doxygen and graphviz.
sudo apt-get install doxygen graphviz
Then start the doxygen and you can find the documentation in ./docs/html/index.html.
doxygen
For more information about the project usage, please refer to the following table.
Index
Document
Introduction
0
Introduce how to dynamically configure parameters such as robot types, planning algorithms, environmental obstacles, etc.
1
Introduce how to use Docker to conveniently build the project environment and simulate it.
2
Introduce how to build a real robot application based on the algorithms provided in this repository.
3
Important updates.
02. Tool Chains
For the efficient operation of the motion planning system, we provide a series of user-friendly simulation tools that allow for on-demand selection of these lightweight repositories.
Tool Version
Introduction
This is a Gazebo plugin for pedestians with collision property. You can construct a dynamic environment in ROS easily using plugin.
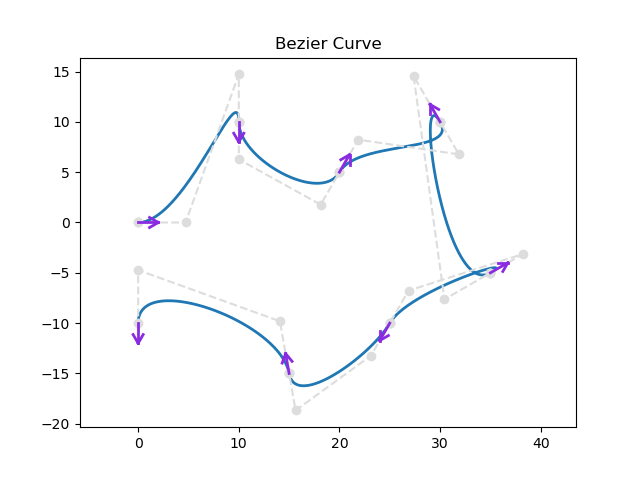
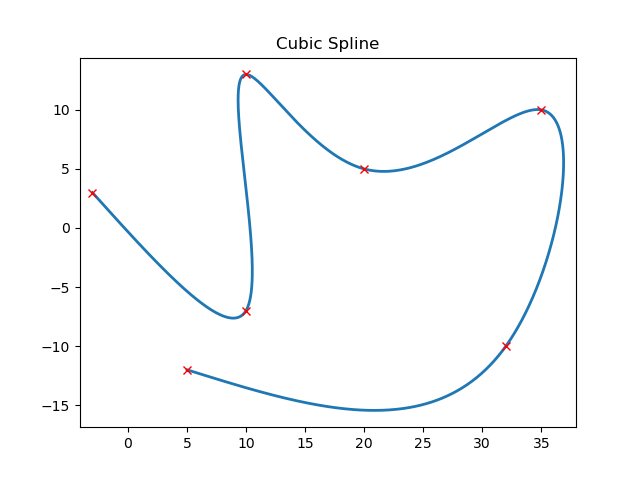
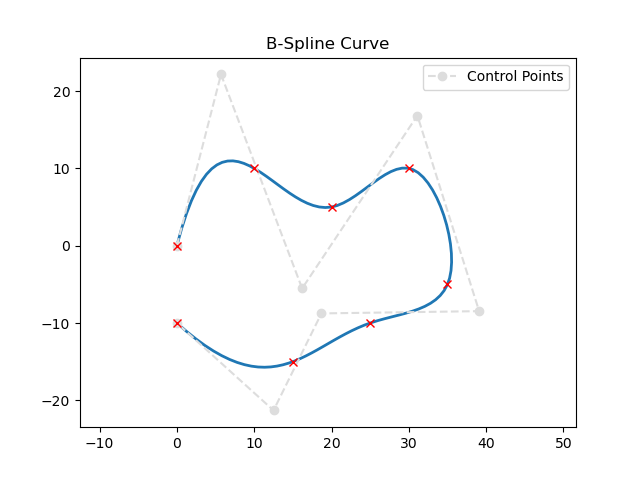
This repository provides a ROS-based visualization Rviz plugins for path planning and curve generation algorithms.
Comunicarea dintre pagina web si esp32 este asincron (bidirectionala) prin websockets cu sincronizare real time intre clientii conectati.
Partea de memorare agenda si setari este stocata pe partitia SPIFFS asemenea unei baze de date clasice
Cand se incarac codul pt primadata vor fi create setari default
In acest moment unele setari cum ar fi cele de wifi pot fi schimabate numai din cod
Pagina web este realizata cu urmatoarele tehnologii: html, tailwind css, alpine js si este functionala si fara conexiune la internet
Partea de securitate este una simpla de tipul: Authorization: Basic
In consola serial sunt printate mai multe informatii legate de actiunile executate de placa
Un aspect foarte important este acela ca interogarea pe care o face placa esp32
pe modulul sim800l este realizata numai cand pinul ring de pe modulul sim800l isi schimba starea. Este foarte importanta ca interogarea
sa se realizeze in acest fel pentru a elimina deleyurile care apar atunci cand interogarea se face in mod repetat
Proiectul contine o partitionarea a spatiului de stocare particularizata (fisierul: partition.csv) si utila in alte proiecte.
Aceasta partitonare contine un spatiu marit pentru partea de cod.
RAM: [== ] 15.9% (used 51948 bytes from 327680 bytes)
Flash: [====== ] 63.6% (used 1332990 bytes from 2097152 bytes)
adaugare pagina web pentru managementul numerelor de telefon;
adaugare senzor de umiditate si temperatura care vor controla releele
adaugare intrari care sa controleze iesirle
adaugare noi comenzi sms
pagile web vor fi trimise ca arhiva pentru reducerea spatiului si al timpului de incarcare al paginii
Comenzi SMS
Comenzi SMS Generale
Parola presetata este 1234
addnr:1234:0756090xxx,0756090xxx //- adaugare numere pentru apeluri maxim 5 intr-un sms (romania) nr. fara prefix
delnr:1234:0756090xxx,0756090xxx //- stergere numere pentru apeluri maxim 5 intr-un sms (romania) nr. fara prefix
delallnr:1234 //- sterge toate numerele de pe cartela sim
restart:1234 //- repornire modul
setzonaapel:1234:1 //- 1 reprezinta iesirea care va fi activa atunci cand se apeleaza modulul;
setpass:1234:2345 //- setare parola noua parola :parola actuala:parola noua
delallsms:1234 //- stergerea tuturor sms-urilor
Setari Zone Iesire (relee)
zout1:1234:sw //- iesirea1:parola: mod contact de tip switch (contact permanent pana la urmatoarea comanda)
zout1:1234:bt:4 //- iesirea1:parola:mod contact de tip button:secunde (contact cu intarziere, cifra 4 reprezinta numarul de secunde dupa care isi schimba starea)
1on //-releu 1 pornit
1off //-releu 1 oprit
Tags: sim800l, esp32, web control, gsm, modul gsm, controller gsm, comenzi sms sim800l,
Laravel is a web application framework with expressive, elegant syntax. We believe development must be an enjoyable and creative experience to be truly fulfilling. Laravel takes the pain out of development by easing common tasks used in many web projects, such as:
Laravel is accessible, powerful, and provides tools required for large, robust applications.
Learning Laravel
Laravel has the most extensive and thorough documentation and video tutorial library of all modern web application frameworks, making it a breeze to get started with the framework.
You may also try the Laravel Bootcamp, where you will be guided through building a modern Laravel application from scratch.
If you don’t feel like reading, Laracasts can help. Laracasts contains over 2000 video tutorials on a range of topics including Laravel, modern PHP, unit testing, and JavaScript. Boost your skills by digging into our comprehensive video library.
Laravel Sponsors
We would like to extend our thanks to the following sponsors for funding Laravel development. If you are interested in becoming a sponsor, please visit the Laravel Patreon page.
Thank you for considering contributing to the Laravel framework! The contribution guide can be found in the Laravel documentation.
Code of Conduct
In order to ensure that the Laravel community is welcoming to all, please review and abide by the Code of Conduct.
Security Vulnerabilities
If you discover a security vulnerability within Laravel, please send an e-mail to Taylor Otwell via taylor@laravel.com. All security vulnerabilities will be promptly addressed.
License
The Laravel framework is open-sourced software licensed under the MIT license.
Back in the hayday of my youth, I spent the first month of my summer vacation from school learning multiplication tables. At the time I couldn’t recall them to quickly, so I was required to spend an hour every day to committing them to memory before going outside to play. This involved memorizing the tables using 3 x 5″ index cards, with the equation written on one side, and the answer on the other. I would randomly sort the cards, and attempt to answer from memory, and checking the other side after each attempt. This eventually worked, after many hours of practice.
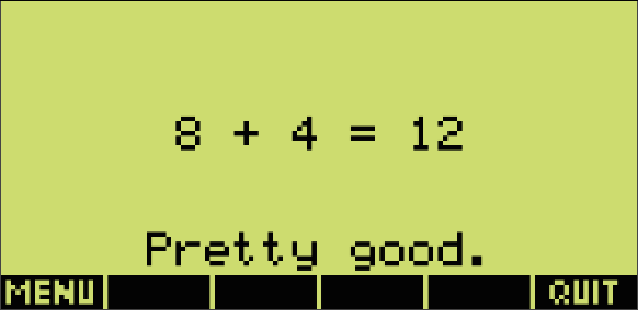
This program simulates the index card approach for learning addition, subtraction, multiplication and division. It relys on the time needed to answer the question to determine progress. This feedback is shown in the form of a short comment1 after the equation and answer are revealed, triggered by a button press. The quicker the responce, the more positive the comment. Random equations2 are shown, starting with 1 + n, where n is any number between 1 and 12. This continues until all 12 equations have been presented, before moving onto 2 + n2, 3 + n3, etc., to help the student start with the easier tables, and gradually work up to bigger numbers. The order of terms will alternate3, so that their memorization is not dependent on a particular order, to recall the answer.
Table
Equation Term Order
Addition
a + b = c b + a = c
Subtract
c – a = b
Multiply
a x b = c b x a = c
Division
c / a = b
This method of learning works on the honor system, since you could just as well press a button immediately after seeing the equation to reveal the answer. The same is true with the index card approach, by just turning the card over and reading the answer. The program works by asking the student to silently read the equation, and then saying the answer out loud, before pressing the button to validate4. Feedback is only provided as an incentive to encourage faster recall, once the basic tables have been learned.
Notes:
The feedback comments range from “Amazing!”, “Pretty good.”, and “Good.”, for answers made within 1, 2, and 4 seconds. Anything longer will provoke the “Ok.” responce.
This program uses the Fischer-Yates shuffle routine to generate the random numbers used to generate the equations. That routine guarantees that no number is repeated, or skipped, which in the end, essentially performs a random sort on the order of equations presented.
The random order of terms are only implemented in addition and multiplication equations. Subtraction and division equations are always presented with the larger term 1st, to avoid generating negative or fractional answers, and unnecessary confusion.
Validation is performed by the student, not the calculator, as it does not have a microphone or speech recognition capabilities. Typing in the answers was considered, but abandoned to focus on developing recall speed instead, the primary goal of this program.
Back in the hayday of my youth, I spent the first month of my summer vacation from school learning multiplication tables. At the time I couldn’t recall them to quickly, so I was required to spend an hour every day to committing them to memory before going outside to play. This involved memorizing the tables using 3 x 5″ index cards, with the equation written on one side, and the answer on the other. I would randomly sort the cards, and attempt to answer from memory, and checking the other side after each attempt. This eventually worked, after many hours of practice.
This program simulates the index card approach for learning addition, subtraction, multiplication and division. It relys on the time needed to answer the question to determine progress. This feedback is shown in the form of a short comment1 after the equation and answer are revealed, triggered by a button press. The quicker the responce, the more positive the comment. Random equations2 are shown, starting with 1 + n, where n is any number between 1 and 12. This continues until all 12 equations have been presented, before moving onto 2 + n2, 3 + n3, etc., to help the student start with the easier tables, and gradually work up to bigger numbers. The order of terms will alternate3, so that their memorization is not dependent on a particular order, to recall the answer.
Table
Equation Term Order
Addition
a + b = c b + a = c
Subtract
c – a = b
Multiply
a x b = c b x a = c
Division
c / a = b
This method of learning works on the honor system, since you could just as well press a button immediately after seeing the equation to reveal the answer. The same is true with the index card approach, by just turning the card over and reading the answer. The program works by asking the student to silently read the equation, and then saying the answer out loud, before pressing the button to validate4. Feedback is only provided as an incentive to encourage faster recall, once the basic tables have been learned.
Notes:
The feedback comments range from “Amazing!”, “Pretty good.”, and “Good.”, for answers made within 1, 2, and 4 seconds. Anything longer will provoke the “Ok.” responce.
This program uses the Fischer-Yates shuffle routine to generate the random numbers used to generate the equations. That routine guarantees that no number is repeated, or skipped, which in the end, essentially performs a random sort on the order of equations presented.
The random order of terms are only implemented in addition and multiplication equations. Subtraction and division equations are always presented with the larger term 1st, to avoid generating negative or fractional answers, and unnecessary confusion.
Validation is performed by the student, not the calculator, as it does not have a microphone or speech recognition capabilities. Typing in the answers was considered, but abandoned to focus on developing recall speed instead, the primary goal of this program.
Gazebo Physics : Physics classes and functions for robot applications
Maintainer: scpeters AT openrobotics DOT org
Build
Status
Test coverage
Ubuntu Noble
Homebrew
Windows
Gazebo Physics, a component of Gazebo, provides an abstract physics interface
designed to support simulation and rapid development of robot applications.
Many physics simulation software libraries have been designed for different
applications (gaming, robotics, science) and with different features
(rigid or deformable contact, 2d or 3d).
Gazebo Physics is designed on the premise that there is not a single physics
engine that is universally best for all simulation contexts.
It should be possible to support a different set of features
for each physics engine according to its capabilities.
A physics engine can then be chosen for each application
based on its context.
Features
Gazebo Physics provides the following functionality:
Granular definition of physics engine features as optional API’s.
Plugin interface for loading physics engines with requested features
at runtime.
Features for common aspects of rigid body dynamic simulation
This library uses Semantic Versioning. Additionally, this library is part of the Gazebo project which periodically releases a versioned set of compatible and complementary libraries. See the Gazebo website for version and release information.
License
This library is licensed under Apache 2.0. See also the LICENSE file.